 学校首页
学校首页

“高端机电装备系统设计”科研成果转化本科教学案例
——《机电一体化系统设计》
完 成 人:樊红卫(课程组长),张旭辉(专业负责人),王川伟,鲁麒(课程副组长),史晓娟,杨文娟,薛旭升,杜昱阳,董明,姜俊英,万翔
完成单位:西安科技大学机械工程学院仪器科学与技术系、机械电子工程系
服务课程:《机电一体化系统设计》——机械电子工程国家一流本科专业核心课程,入选国家级一流课程
案例内容:围绕数控机床、煤矿装备、机器人3类典型的机电一体化系统给出课程组科研转化教学案例
使用说明:本案例旨在为《机电一体化系统设计》课程的教学经验交流和学生学习本门课程提供参考
使用权限:未经本课程组书面同意,不得转载,不以任何目的私自使用本网页文本和图片,违者必究
案例1:高速精密机床电主轴智能动平衡系统
摘要:针对高速精密机床电主轴不平衡问题,设计开发了一套主轴转子智能动平衡系统。该系统包括:1)主动平衡作动器,2)主动平衡控制器,3)信号采集系统。系统工作时,首先由信号采集系统获取主轴的振动、转速等信息,对其进行时域、频域等分析获得不平衡特征,然后将有效信息输送至控制器,由控制器按照基于影响系数的自适应控制算法进行决策,并发送指令给平衡作动器,最后由作动器施行配重块的极坐标运动,形成不平衡补偿矢量,实现对主轴运行过程中转子质量不平衡问题的在线主动抑制。
关键词:机床主轴;主轴不平衡;在线主动平衡
一、科研项目基本信息介绍
樊红卫,张旭辉,肖玲,程文杰,吴中华,董润霖,刘永伟. 高品质自适应电磁平衡机理及自平衡电主轴动态特性研究,国家自然科学基金青年项目,51605380,2017-01至2019-12,24万元,已结题.
二、科研促进教学案例
1.案例主要内容
“高速精密机床电主轴智能动平衡系统”如图1所示,采用压电式加速度传感器和电涡流位移传感器检测主轴振动,采用光电反射式传感器测量主轴转速和相位,采用DSP+FPGA开发控制器,平衡作动器采用电磁-永磁混合驱动方式、配重块进行等半径极坐标运动,双盘合成等效平衡矢量,基于单平面影响系数自适应方法进行控制决策。图1所示为系统在高速磨削电主轴上的应用示例。
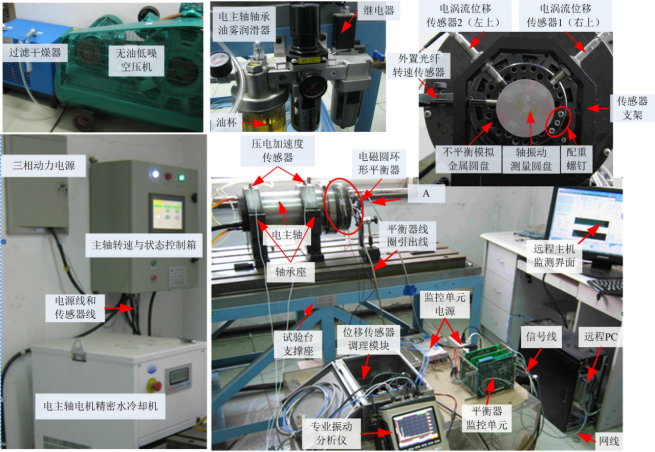
图1 高速精密机床电主轴智能动平衡系统
本案例已开发相关实验平台2套,发表论文40余篇,申请专利6项,登记软著2件,可用于《机电一体化系统设计》《数控技术》《机械工程测试技术》《机械控制工程基础》等课程的案例教学。
2.案例实际应用效果简介
(1)本案例长期用于机械类各专业本科生《机电一体化系统设计》等多门课程的理论教学,具有技术前沿性、综合性和实用性特点,能够支撑学生创新能力和知识综合应用能力的培养,启发学生认识并探索解决复杂机电工程问题。
(2)本案例相关内容已在张旭辉、樊红卫等主编《机电一体化系统设计》规划教材中引用,主要服务于该教材“第7章 机电一体化典型系统设计——7.2 数控机床系统设计”章节的讲授,体现了教学内容的新颖性和高阶性。
3.支撑材料
(1)“高品质自适应电磁平衡机理及自平衡电主轴动态特性研究”国家自然科学基金申报书、结题报告;
(2)自适应电磁平衡系统研制报告,含视频、图片等;
(3)已发表的主要参考论文
[1]樊红卫,邵偲洁,杨一晴,万翔,张旭辉,马宏伟.一种机械式自平衡电主轴系统及试验研究[J].制造技术与机床,2019(03):50-54.DOI:10.19287/j.cnki.1005-2402.2019.03.012.
[2]樊红卫,景敏卿,智静娟,辛文辉,李猛,刘恒.转子在线动平衡嵌入式控制系统开发与验证[J].振动.测试与诊断,2015,35(04):746-751+802.DOI:10.16450/j.cnki.issn.1004-6801.2015.04.024.
[3]樊红卫,景敏卿,王仁超,刘恒.磁力配重型在线自动平衡头的作动原理研究[J].西安交通大学学报,2013,47(02):97-102.
4.案例思考题
(1)转子在线主动平衡执行器有哪些类型?它们的工作原理分别是什么?
(2)转子在线主动平衡控制器的架构还可以如何设计?相关动平衡控制算法有哪些?
(3)请你绘制转子在线主动平衡系统框图。
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握“高速精密机床电主轴智能动平衡系统”检测单元、控制单元、机械单元的设计思路和方法。
教学建议:建议采用翻转课堂教学法,学生通过查阅文献自主完成设计,课堂上教师给予针对性的指导。
6.案例联系人
樊红卫 hw_fan@xust.edu.cn,15829711143
案例2:数控机床开放式数控系统
摘要:运动控制系统是开放式数控系统的核心组成部分,负责控制数控机床每个轴的准确定位。针对数控机床高速、高精度的应用需求,完成了高性能运动控制系统的研发。为解决数控机床运动控制中出现的强耦合、非线性和易受干扰等问题,建立了数控机床运动控制系统的数学模型,对其位置控制算法进行深入研究,改善运动控制系统的稳态精度与动态响应性能,从而提高数控机床的单轴定位精度和轮廓加工精度。
关键词:数控系统;运动控制,控制算法
一、科研项目基本信息介绍
史晓娟,李建华,王渊,王高洋,齐彪,张修德. 数控机床高性能运动控制系统的研发,西安市科技局科技创新引导项目,201805036YD14CG20(2),2018-06至2020-06,6万元,已结题.
二、科研促进教学案例
1.案例主要内容
“数控机床高性能运动控制系统”如图1所示。采用基数字信号处理器(DSP)、现场可编程门阵列(FPGA)及微机PCI总线完成了高性能运动控制系统的硬件设计和软件设计,可以提高运动控制系统的实时性以及运算速度。采用电子学细分法基于FPGA器件对运动控制系统的位置检测电路进行优化设计,可以极大地提高编码器位置信息的分辨力、精度和抗干扰性,充分保障了位置反馈的精度和可靠性。研究高性能的位置闭环控制算法,提高运动控制系统的抗干扰能力及对系统参数变化的适应性,提高各进给轴的定位精度。图1所示为运动控制系统在三维数控铣床模型上的应用。

图1 三维数控铣床仿真加工模型
本案例已开发相关实验平台1套,发表论文10余篇,申请国家发明专利1项,国家实用新型专利1项,可用于《机电一体化系统设计》《数控技术》《机械工程测试技术》《机械控制工程基础》等课程的案例教学。
2.案例实际应用效果简介
(1)本案例长期用于机械类各专业本科生《机电一体化系统设计》《数控技术》等多门课程的理论教学,具有技术前沿性、综合性和实用性特点,能够支撑学生创新能力和知识综合应用能力的培养,启发学生认识并探索解决复杂机电工程问题。
(2)本案例相关内容已在张旭辉、樊红卫等主编《机电一体化系统设计》规划教材中体现,主要服务于该教材“第7章 机电一体化典型系统设计——7.2 数控机床系统设计”章节的讲授,体现了教学内容的新颖性和高阶性。
3.支撑材料
(1)“数控机床高性能运动控制系统的研发”西安市科技局科技创新引导项目申报书、结题报告;
(2)运动控制系统技术报告;
(3)已发表的主要参考论文
[1]X J Shi. D D Chen. Design and Implementation of Position Detection System Based on 3-UPU Parallel Mechanism[C]. IEEE 2nd International Conference on Micro/Nano Sensors for AI, Healthcare, and Robotics. Shenzhen, China, Oct. 2019.
[2]史晓娟,杨紫艳.基于模糊滑模控制的数控机床位置伺服系统[J]. 制造技术与机床,2017,(3):64-68.
4.案例思考题
(1)数控机床各进给轴的执行部件有哪些类型?它们的工作原理分别是什么?
(2)如何提供数控机床的位置检测精度?
(3)什么是开环、半闭环和闭环位置伺服系统?如何提高运动控制系统的控制精度?
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握“数控机床高性能运动控制系统”检测单元、控制单元、机械单元的设计思路和方法。
教学建议:建议采用翻转课堂教学法,学生通过查阅文献自主完成设计,课堂上教师给予针对性的指导。
6.案例联系人
史晓娟 shixj@xust.edu.cn,13891966085
案例3:绿色化数控机床系统
摘要:针对高端数控机床运行过程高投入、高能耗、高污染、低效益等问题,设计开发了一套数控珩磨装备的碳排放量化分析与关键零部件低碳结构设计系统。该系统包括:1)碳排放建模与评估功能模块,2)关键零部件决策功能模块,3)低碳结构设计功能模块。系统工作时,首先针对待设计的零部件设置碳排放相关参数,量化机床原材料获取阶段、制造加工阶段和使用阶段的碳排放;然后对温度场进行仿真建模,建立碳排放场,获得关键零部件决策结果;最后设置拓扑优化及算法相关参数,调用双层嵌套的博弈求解方法优化关键零部件刚度和碳排放,并对结果进行输出,从而指导设计人员对数控珩磨装备高碳排放关键部件进行改进和优化。
关键词:珩磨机床;绿色设计;结构优化;碳排放
一、科研项目基本信息介绍
[1]鲁麒. 碳排放-静动态特性耦合的磨削机床关键部件辨识及结构优化,国家自然科学基金青年项目,52005400,2021-01至2023-12,24万元,在研.
[2]鲁麒. 基于低碳多属性关联的珩磨机床关键部件结构优化设计,博士后“地区专项支持计划”,2021M693881,2022-01至2023-12,8万元,在研.
二、科研促进教学案例
1.案例主要内容
数控珩磨装备的“碳排放量化分析与关键零部件低碳结构设计系统”如图1所示。
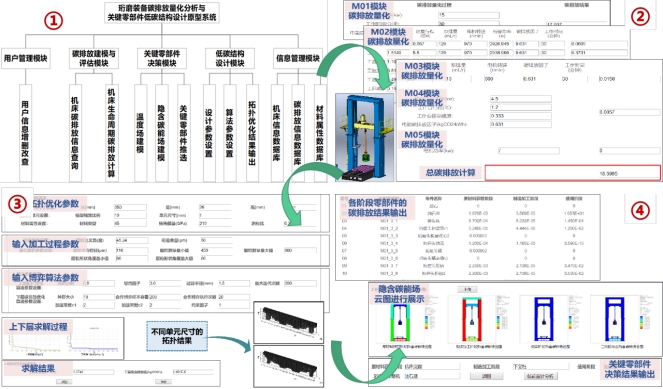
图1 碳排放量化分析与关键零部件低碳结构设计系统
本案例已开发相关实验平台1套,发表论文8余篇,申请专利2项,可用于《机电一体化系统设计》《数控技术》《机械设计》《现代设计法》《机械制造装备》等课程案例教学。
2.案例实际应用效果简介
本案例可用于机械类各专业本科生《机电一体化系统设计》等多门课程的理论与实践教学。高档数控装备是典型的机电一体化产品,其绿色化发展是实现我国2030年“碳达峰”与2060年“碳中和”目标的有效途径。数控机床的绿色、低碳发展也是《机电一体化系统设计》等课程中的重要教学内容,本案例能够将制造强国等课程思政理念融入到学科专业教学中,形成全方位协同育人效应。同时,案例的技术前沿性、综合性等特点,能够引导学生学习知识,培养发现问题、解决问题的能力。
3.支撑材料
(1)“碳排放-静动态特性耦合的磨削机床关键部件辨识及结构优化”国家自然科学基金申报书、“基于低碳多属性关联的珩磨机床关键部件结构优化设计”博士后科学基金申报书;
(2)已发表的主要参考论文
[1]Lu, Q., Zhou, G. H., Zhao, F., Ren, Y., Li, L., Luan, X., & Sutherland, J. W. (2019). Topology optimization of oilstone components considering carbon emissions associated with honing processes. Journal of Cleaner Production, 225, 181-195.
[2]Lu, Q., Zhou, G.H., Zhao, F., Li, L., & Ren, Y.P. (2018). Determination of Shape and Distribution of Abrasive Grains to Reduce Carbon Emissions of Honing Process. Journal of manufacturing science and engineering-transactions of the ASME, 141(2).
[3]Lu, Q., Zhou, G. H., Xiao, Z. D., Chang, F. T., & Tian, C. L. (2018). A selection methodology of key parts based on the characteristic of carbon emissions for low-carbon design. International Journal of Advanced Manufacturing Technology, 94(9-12), 3359-3373.
4.案例思考题
(1)机床的全生命周期阶段有哪些,各阶段的主要任务是什么?
(2)机床加工过程的功率模型实验平台如何设计?采用哪些传感器?
(3)轻量化设计方法有哪些?请你用Ansysworkbench对扳手结构进行拓扑优化设计。
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握“碳排放量化分析与关键零部件低碳结构设计系统”检测单元、控制单元、机械单元的设计思路和方法。
教学建议:建议采用翻转课堂教学法,学生通过查阅文献自主完成设计,课堂上教师给予针对性的指导。
6.案例联系人
鲁麒 luqi@xust.edu.cn,15109263212
案例4:智能移动机器人系统
摘要:伴随工业4.0在全球掀起新一轮工业革命,我国大力推行“中国制造2025”战略,机器人迎来前所未有的机遇。目前,地面机器人相关技术已很发达,其越障避障能力要求非常高。为适应更复杂的地形环境,研发了四摆臂六履带智能移动机器人系统,其主要由机械系统、测控系统等组成。结合传感检测、信息融合、远程通信等关键技术,采用分布式、模块化思想搭建智能移动机器人测控系统。该机器人具备较强的越障避障功能,配备相应的传感检测装置,可在灾害发生后代替救援人员进入救援现场,或替代工作人员从事日常巡检工作。
关键词:移动机器人;机械系统;测控系统;越障避障
一、科研项目基本信息介绍
橡胶履带机器人行驶机理研究,陕西省科技厅基金青年项目,2018JQ5116,2019-01至2021-12,3万元,已结题.
二、科研促进教学案例
1.案例主要内容
四摆臂六履带智能移动机器人系统,如图1所示。智能移动机器人系统主要由机械系统、测控系统等组成。机器人机械系统主要部件有车体、摆臂装置、履带行走机构、传动装置等,摆臂装置主要由前左摆臂、前右摆臂、后左摆臂、后右摆臂等组成。智能移动机器人测控系统分为三个层次,即运动执行控制层,传感与信号处理层和决策控制层,如图2所示。机器人系统配备有里程计、摄像系统、激光雷达、超声波传感器、红外传感器、陀螺仪、速度或加速度计等传感器。
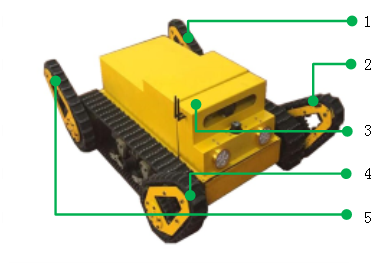
1-后左摆臂系统,2-前左摆臂系统,3-机器人本体,4-前右摆臂系统,5-后右摆臂系统
图1 智能移动机器人机械系统图
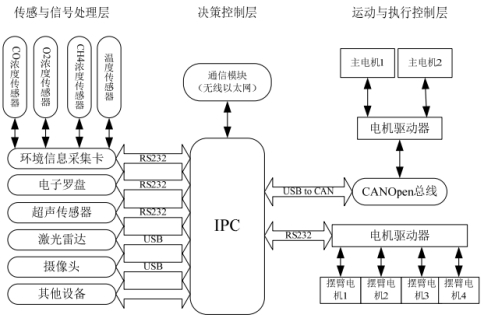
图2智能移动机器人测控系统图
本案例已开发相关实验平台2套,发表论文20余篇,申请专利10余项,可用于《机电一体化系统设计》《机器人技术》《机械控制工程基础》等课程的案例教学。
2.案例实际应用效果简介
(1)本案例长期用于机械类各专业本科生《机电一体化系统设计》等多门课程的理论教学,具有技术前沿性、综合性和实用性特点,能够支撑学生创新能力和知识综合应用能力的培养,启发学生认识并探索解决复杂机电工程问题。
(2)本案例相关内容已在张旭辉、樊红卫等主编《机电一体化系统设计》规划教材中引用,主要服务于该教材“第3章 机电一体化机械系统设计”、“第5章 机电一体化检测系统设计”、“第6章 机电一体化控制系统设计”、“第7章 机电一体化典型系统设计”等章节的讲授,体现了教学内容的新颖性和高阶性。
3.支撑材料
(1)智能移动机器人研制报告,含视频、图片等;
(2)已授权的发明专利
[1]基于无线通信传播特性井下救援机器人通讯节点布放方法,专利号:CN201611104717.6
[2]一种六履带四摆臂救援机器人及其自主行走控制方法,专利号:CN201610710117.8
[3]六履带四摆臂救援机器人的自主越障避障行走控制方法,专利号:CN201610709774.0
(3)已发表的主要参考论文
[1]王川伟,马宏伟,薛旭升,杨林,王岩.煤矿履带巡检机器人多体动力学建模及越障仿真[J].西安科技大学学报,2020,40(05):790-796.
[2]杨林,马宏伟,王岩,王川伟.煤矿井下移动机器人运动规划方法研究[J].工矿自动化,2020,46(06):23-30.
[3]杨林,马宏伟,王岩,王川伟,张珍珍.煤矿巡检机器人同步定位与地图构建方法研究[J].工矿自动化,2019,45(09):18-24.
[4]王川伟,马琨,杨林,马宏伟,薛旭升,田海波.四摆臂-六履带机器人单侧台阶障碍越障仿真与试验[J].农业工程学报,2018,34(10):46-53.
[5]薛旭升,马宏伟,尚万峰.煤矿救援无线通信机器人系统设计[J].矿山机械,2015,43(04):104-107.
4.案例思考题
(1)地面应用的智能移动机器人系统设计需要考虑哪些因素?在井下应用又需要考虑哪些因素?
(2)智能移动机器人的行走机构主要有哪些类型?
(3)智能移动机器人在煤矿井下如何实现精确定位?
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握“移动机器人系统”机械系统、检测系统、控制系统的设计思路和方法。
教学建议:建议采用翻转课堂教学法,学生通过查阅文献自主完成设计,课堂上教师给予针对性的指导。
6.案例联系人
王川伟 wangchuanwei228@xust.edu.cn,18192953039
案例5:护盾式快速掘进机器人系统
摘要:我国95%的煤矿采用井工开采,长期坚持“采掘并重,掘进先行”方针。综采工作面智能化初见成效,而综掘工作面智能化滞后,导致“采掘失衡”,严重影响煤矿安全、高效、智能生产。随着煤炭开采技术进一步发展,所需掘进队伍和人员还将持续增加,造成生产、安全管理和掘进成本大幅提高,无法满足现代化矿井发展需要。现有悬臂式掘进系统操作人员多、劳动强度大、掘进效率低,不能满足快速、智能掘进需求。针对复杂地质条件煤巷快速智能掘进难题,研发煤巷智能掘进机器人系统,包括系统总体设计、机械系统设计、动力系统设计、检测系统设计、控制系统设计等。系统通过矿井环网和地面环网,在井下集控中心和地面监控中心可实现人员安全预警、环境安全预警、设备故障预警、关键部位视频监控、三维地质模型动态更新和数字孪生驱动的远程智能测控,及远程一键启停,还具备对关键信息进行实时存储和历史数据查询等功能。
关键词:掘进机器人;智能掘进;智能测控
一、科研项目基本信息介绍
煤矿智能掘进技术及成套装备研发与示范项目,陕西煤业化工集团小保当矿业有限公司, 2019-03 至 2020-06, 2080万元, 已结题.
二、科研促进教学案例
1.案例主要内容
护盾式煤矿智能掘进机器人系统总体方案如图1所示,集截割、支护、钻锚、装载、运输为一体,以截割机器人为核心,进行集成控制和协同作业。该系统由全宽横轴截割机器人、临时支护机器人Ⅰ和Ⅱ、钻锚机器人、超前探测与防冲卸压系统、转载运输系统、通风除尘系统、电液控平台等多机器人系统组成,通过多机器人系统协作完成掘进任务。智能测控系统总体架构如图2所示,其包含三层,分别为本地控制层、近程集控层和远程监控层。
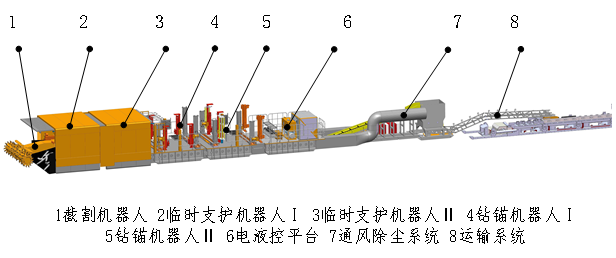
图1 护盾式煤矿智能掘进机器人机械系统组成
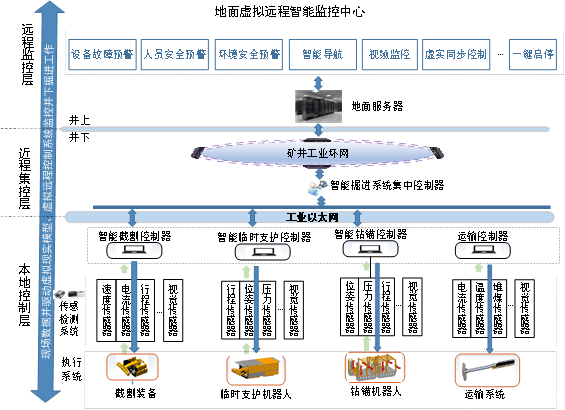
图2 护盾式煤矿智能掘进机器人测控系统组成
本案例已研发实物平台1套,发表论文20余篇,申请专利10余项,可用于《机电一体化系统设计》《机器人技术》《矿山设备与电气控制》《机械控制工程基础》等课程的案例教学。
2.案例实际应用效果简介
(1)本案例长期用于机械类各专业本科生《机电一体化系统设计》等多门课程的理论教学,具有技术前沿性、综合性和实用性特点,能够支撑学生创新能力和知识综合应用能力的培养,启发学生认识并探索解决复杂机电工程问题。
(2)本案例相关内容已在相关煤矿实际应用,通过科研成果转化为教学案例,向学生讲授最新科技前沿和现代化煤矿机器人产品,体现了教学内容的先进性和高阶性。
3.支撑材料
(1)护盾式快速掘进机器人系统研制报告,含视频、图片等;
(2)已授权的发明专利
[1]一种掘进机远程控制系统及方法,专利号:CN201410086340.0
[2]一种煤矿巷道智能掘进机器人控制系统,专利号:CN202010690931.4
[3]一种滑靴式锚网运输机器人,专利号:CN202010690410.9
(3)已发表的主要参考论文
[1]马宏伟,杨金科,毛清华,汪强.煤矿护盾式掘进机器人系统精确定位研究[J].工矿自动化,2022,48(03):63-70.
[2]高佳晨,马宏伟,王川伟,薛旭升,姚阳.煤矿巷道掘进锚网运输机器人结构设计及运动规划[J].煤炭工程,2021,53(11):175-180.
[3]马宏伟,王鹏,王世斌,毛清华,石增武,夏晶,杨征,薛旭升,王川伟.煤矿掘进机器人系统智能并行协同控制方法[J].煤炭学报,2021,46(07):2057-2067.
[4]马宏伟,王世斌,毛清华,石增武,张旭辉,杨征,曹现刚,薛旭升,夏晶,王川伟.煤矿巷道智能掘进关键共性技术[J].煤炭学报,2021,46(01):310-320.
[5]马宏伟,王鹏,张旭辉,曹现刚,毛清华,王川伟,薛旭升,刘鹏,夏晶,董明,田海波.煤矿巷道智能掘进机器人系统关键技术研究[J].西安科技大学学报,2020,40(05):751-759.
4.案例思考题
(1)护盾式快速掘进机器人系统设计需要考虑哪些因素?
(2)护盾式快速掘进机器人系统比常规掘进系统有哪些优点?
(3)护盾式快速掘进机器人系统在煤矿井下如何实现精确定位、导航?
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握“护盾式快速掘进机器人系统”机械系统、检测系统、控制系统的设计思路和方法。
教学建议:建议采用翻转课堂教学法,学生通过查阅文献自主完成设计,课堂上教师给予针对性的指导。
6.案例联系人
王川伟 wangchuanwei228@xust.edu.cn,18192953039
案例6:龙门钻锚机器人系统
摘要:针对煤矿巷道掘进面临高瓦斯、顶帮支护任务重、底板起伏大、瓦斯粉尘威胁大等难题,研制一种龙门式钻锚机器人。机器人与传统悬臂式掘进机交互工作,通过人机协同完成顶板锚杆及侧帮锚杆的钻锚任务;侧帮钻机既可在龙门框架的前端布置,又可在龙门框架的后端布置,以适应不同侧帮稳定性的要求;采用防碰撞措施防止龙门式钻锚机器人、悬臂式掘进机在移动或作业过程中发生干涉。该系统对提高复杂地质条件掘进效率,减少作业人员,保证安全生产,对破解我国复杂地质条件的巷道支护难题具有很好的借鉴和示范作用。
关键词:钻锚机器人;龙门框架;巷道支护;臂式掘进机
一、科研项目基本信息介绍
桑树坪二号井复杂地质条件下龙门式钻锚机器人研制与应用项目,陕西陕煤韩城矿业有限公司, 2021-01 至 2021-09,已结题
二、科研促进教学案例
1.案例主要内容
智能龙门钻机器人系统主要包括传统掘进机、履带式龙门钻锚机器人、通风除尘装置、主运皮带和二运皮带及其他传统辅助设备,空间关系是掘进机为首在工作面掘进,钻锚机器人在后方距工作面迎头10m处,风筒为定制风筒,在煤壁左侧,挂在已打好的侧帮锚杆上,主运皮带连在掘进的后面。智能龙门钻机器人系统俯视图如下图1。
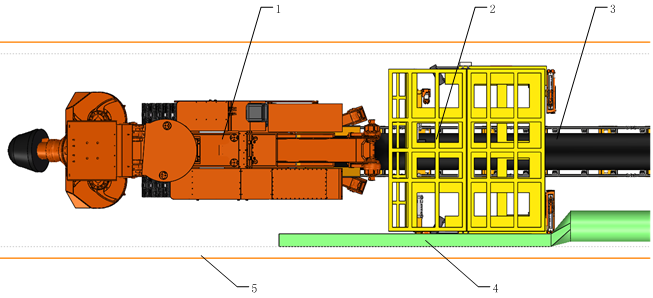
1-掘进机器人 2-履带式龙门钻锚机器人 3-二运皮带 4-风筒 5-巷道
图1 智能龙门钻机器人系统
本案例已研发实物平台1套,发表论文10余篇,申请专利10余项,可用于《机电一体化系统设计》《机器人技术》《矿山设备与电气控制》《机械控制工程基础》等课程的案例教学。
2.案例实际应用效果简介
(1)本案例长期用于机械类各专业本科生《机电一体化系统设计》等多门课程的理论教学,具有技术前沿性、综合性和实用性特点,能够支撑学生创新能力和知识综合应用能力的培养,启发学生认识并探索解决复杂机电工程问题。
(2)本案例相关内容已在相关煤矿实际应用,通过科研成果转化为教学案例,向学生讲授最新科技前沿和现代化煤矿机器人产品,体现了教学内容的先进性和高阶性。
3.支撑材料
(1)龙门钻锚机器人系统研制报告,含视频、图片等;
(2)已授权的发明专利
[1]一种龙门式掘护锚机器人系统,专利号:CN202010950447.0
[2]龙门式多钻机并行钻锚机器人,专利号:CN202010690935.2
[3]一种悬臂式掘进机截割头位姿视觉测量方法,专利号:CN201710443405.6
(3)已发表的主要参考论文
[1]梁林,马宏伟,赵昊.复杂地质条件煤矿巷道龙门式钻锚机器人研究[J].煤炭工程,2021,53(11):181-185.
[2]马宏伟,王成龙,尚东森,薛旭升,薛力猛.煤矿井下钻锚机器人布网单元设计与仿真[J].煤炭工程,2019,51(06):160-164.
[3]杨文娟,张旭辉,马宏伟,刘志明.悬臂式掘进机机身及截割头位姿视觉测量系统研究[J].煤炭科学技术,2019,47(06):50-57.
[4]马宏伟,尚东森,杨宇婷.煤矿钻锚机器人自动钻锚单元的设计与仿真分析[J].煤矿机械,2018,39(10):3-6.
4.案例思考题
(1)复杂地质条件下钻锚机器人系统设计需要考虑哪些因素?
(2)履带式钻锚机器人如何实现井下精确定位与控制?
(3)悬臂式掘进机如何实现巷道断面精确截割?
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握“龙门钻锚机器人系统”机械系统、检测系统、控制系统的设计思路和方法。
教学建议:建议采用翻转课堂教学法,学生通过查阅文献自主完成设计,课堂上教师给予针对性的指导。
6.案例联系人
王川伟 wangchuanwei228@xust.edu.cn,18192953039
案例7:煤矿综采工作面数字孪生监控系统
摘要:本案例针对煤矿综采工作面设备的虚拟远程监控问题,以unity3D平台为软件开发工具,设计开发基于综采三机设备数字孪生建模的远程监控系统,通过真实再现与还原煤矿设备以及生产场景,利用各类工况传感器采集设备位姿信息,实现虚拟设备与真实设备的同步控制,建立设备虚拟模型的运动控制方法,实现数字孪生特性下的虚拟控制技术,最终实现对于综采设备的远程虚拟监控。
关键词:综采工作面;虚拟仿真;数字孪生;虚实同步
一、科研项目基本信息介绍
该案例源自西安煤矿机械有限公司委托横向课题的研发成果,首先在实验室利用真实比例缩小的设备模型实现远程监控功能,近年来代表陕煤集团等企业进行设备远程虚拟控制技术展示,并衍生掘进设备智能控制等技术,在多个煤矿现场进行工业试验,效果良好。
二、科研促进教学案例
1.案例主要内容
“煤矿综采工作面数字孪生监控系统”如图1所示,利用三维建模软件搭建综采工作面虚拟模型与虚拟场景,采用虚拟仿真平台设计数字孪生监控程序,根据真实采煤过程设计虚拟样机动作以及相互配合关系。结合各类工况传感器,实现从真实设备通过数据融合与智能感知、数据模型优化,最终实现在数字空间对综采工作面设备的虚实同步控制。
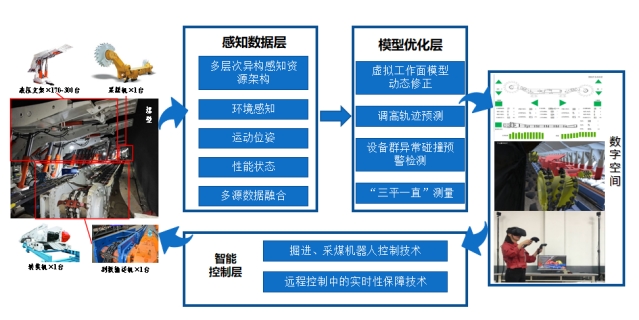
图1煤矿综采工作面数字孪生监控系统
本案例已开发相关虚拟仿真实验平台1套,相关虚拟仿真实验4个,发表论文20余篇,申请专利10项,登记软著6件,可用于《机电一体化系统设计》《矿山机械》《矿山设备与电气控制》等课程的案例教学。
2.案例实际应用效果简介
(1)本案例长期用于机械类各专业本科生《机电一体化系统设计》《矿山设备与电气控制》等多门课程的理论教学,能够支撑煤矿机械、智能采矿、远程监控、信号处理等教学内容讲授。
(2)本案例相关内容已部署西安科技大学机械工程学院虚拟仿真线上平台,已对全校多专业、校外同行业技术人员开放。
3.支撑材料
(1)“煤矿综采工作面数字孪生监控系统”国家一流课程虚拟仿真实验申报书、虚拟仿真实验说明书;
(2)煤矿综采工作面数字孪生监控系统操作视频、图片等。
4.案例思考题
(1)简述矿山设备控制方式,简述自动控制系统的组成,有哪些性能指标?
(2)简述综采工作面采煤工艺过程,描述三机设备工作原理。
(3)设计综采设备数字孪生控制系统界面。
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握“煤矿综采工作面数字孪生监控系统”有助于培养学生在三维建模以及煤矿设备远程监控方案设计与实际开发能力的训练。
教学建议:建议采用结合线上实验教学平台的方法,学生通过线上虚拟仿真实验平台完成设计,课堂上教师给予针对性的指导。
6.案例联系人
张旭辉 zhangxh@xust.edu.cn,13363975328
杜昱阳 1090973350@qq.com,13110413501
案例8:煤矿掘进装备定位与控制系统
摘要:煤矿巷道掘进受井下巷道特殊的非结构化环境及相对复杂工艺环节制约,“采掘失衡”现象突出,围绕“煤矿掘进设备长距离高精度定位”行业卡脖子问题,聚焦掘进设备长距离动态精确定位方法等研究,破解了恶劣环境下狭长空间的视觉精确定位难题,研发出一套煤矿掘进工作面智能操控系统,形成了井下巷道掘进装备精确定位、定向导航和定形截割技术。具体功能如下:①基于激光束合作标靶的掘进机机身位姿视觉测量;②掘进机定向导航与自主纠偏控制;③矩形、拱形等不同巷道截面自动成形控制;④人工示教成形轨迹智能生成;⑤视觉伺服记忆截割;⑥巷道截割轨迹实时显示、超挖欠挖报警和虚拟远程操控等功能。
关键词:智能掘进;视觉定位;记忆截割;成形控制
一、科研项目基本信息介绍
2014年以来,张旭辉教授聚焦巷道近程或地面远程智能掘进场景控制需求,带领团队不断探究智能掘进关键技术难题,为煤矿巷道掘进智能化相关理论与技术研究奠定了坚实基础,通过对煤矿智能化装备的创新研发,在煤矿采掘工作面智能截割技术、虚拟数字工作面构建及远程控制、智能采掘装备研发方面突破了多项关键核心技术,以“DT+VR” 远程决策、“视觉+”位姿测量、“人工示教”记忆截割,以及“虚拟设备”碰撞预警等四大核心技术,解决了智能决策、精确定位(定向导航和成形质量的基础)、轨迹规划和设备群碰撞预警难题。核心技术先后在陕煤小保当、榆林大海则、山西王家岭等煤矿井下掘进工作面进行了验证,为解决煤矿远程智能掘进提供了新的实现路径。为全面推进煤矿智能化发展积累了宝贵的经验,通过不断地进行理论、技术与装备创新,为推动我国煤炭工业快速发展提供有力支撑。
二、科研促进教学案例
1.案例主要内容
煤矿掘进装备定位与控制系统主要由红外防爆标靶、激光指向仪、前置防爆工业相机、后置防爆工业相机、防爆计算机、毫米波雷达、PLC、捷联惯导等构成。煤矿掘进装备定位与控制系统如图1所示。
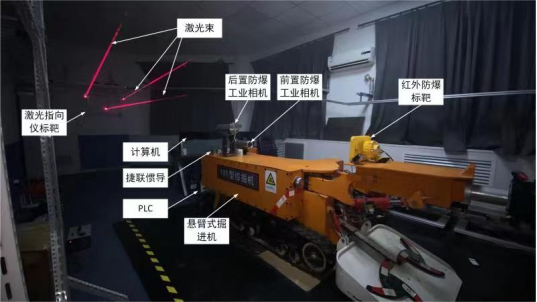
图1煤矿掘进装备定位与控制系统实验平台
前置防爆相机和后置防爆相机分别面向前后固定于机身上;红外标靶固定于掘进机截割臂上;将激光指向仪固定于巷道顶部的锚杆上,毫米波雷达固定放在机身两侧,PLC与捷联惯导安装在防爆电控箱内。其中,前置防爆工业相机、红外标靶和防爆计算机构成截割头视觉测量系统,后置防爆工业相机与激光指向仪和防爆计算机构成掘进机机身位姿测量系统,捷联惯导用来获取掘进机实时姿态信息,毫米波雷达获取掘进机到截割断面煤壁的距离。图2、3分别为掘锚一体机高精度组合定位系统软件界面,及掘进机可视化自动截割软件界面。
掘进装备定位与控制系统工作原理:利用前置防爆工业相机采集红外防爆标靶的图像,后置防爆相机采集激光指向仪的图像信息,将采集到的图像经以太网传输至防爆计算机中,在计算机中分别对红外LED特征图像和激光图像进行图像处理,获取标靶红外点特征和激光点线特征信息。通过构建测量系统全局坐标系,利用单目视觉测量原理,建立基于共面特征点的截割头位姿视觉测量模型和掘进机机身位姿视觉测量模型,结合所得图像特征解算掘进机截割头和机身在巷道坐标系下的位姿坐标。再融合捷联惯导和毫米波雷达数据等传感器信息最终得到悬臂式掘进机截割头、机身位姿以及掘进机状态信息。建立截割臂自动控制模型和定向掘进控制模型,以掘进机截割头和机身位置信息为反馈,与规划的路径或期望位置进行比较得到掘进机位置偏差,结合相应控制算法通过PLC控制向掘进机电液比例阀发送控制命令,控制掘进机的液压系统驱动掘进机截割臂和左右履带运动,实现掘进机自动控制。

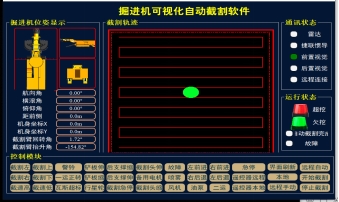
图2 掘锚一体机高精度组合定位系统软件界面 图3 掘进机可视化自动截割软件界面
本案例已开发相关实验平台2套,发表论文40余篇,申请专利21项,登记软著3件,相关成果获省部级以上科技奖 10 余项,可用于《机电一体化系统设计》、《机械工程测试技术》《矿山设备与电气控制》等课程的案例教学。
2.案例实际应用效果简介
(1)本案例应用于机械类各专业本科生《机电一体化系统设计》、《矿山设备检测与控制》等多门课程的理论教学,具有前沿性、学科交叉性、综合性和实用性特点,该案例煤矿行业特色鲜明,能够有助于学生创新能力和知识综合应用能力的培养,启发学生认识并探索解决实际复杂机电工程问题,增强学生利用所学知识服务煤矿行业发展的责任与意识。
(2)本案例相关内容已在《机电一体化系统设计》、《矿山设备检测与控制》规划教材中引用,主要服务于该教材“第7章 机电一体化典型系统设计”的讲授,体现了教学内容的前沿性、创新性和高阶性。
3.支撑材料
(1)企业合作项目,中煤(天津)地下工程智能研究院有限公司,掘进机机身高精度组合式自动定位技术;
(2)企业合作项目,陕西敏斯特智能科技有限公司,矿用掘进机位姿测量系统开发;
(3)企业合作项目,山东天河科技股份有限公司,巷道掘进视觉定位与导航系统;
(4)企业合作项目,中煤(天津)地下工程智能研究院有限公司,中煤大海则煤矿智能化掘进工作面研究与应用——掘锚一体机实时姿态监测、长距离精确定位技术研究;
(5)国家自然科学基金青年项目,矿用防爆相机折射成像建模与多激光束掘进设备视觉定位方法;
(6)张旭辉,赵建勋,杨文娟,张超.悬臂式掘进机视觉导航与定向掘进控制技术[J].煤炭学报,2021,46(07): 2186-2196.
(7)张旭辉,杨文娟,薛旭升,等.煤矿远程智能掘进面临的挑战与研究进展[J].煤炭学报,2022,47(01):579-597.
(8)杨文娟,张旭辉,张超,万继成,杜昱阳,杨红强,石硕.基于三激光束标靶的煤矿井下长距离视觉定位方法[J].煤炭学报,2022,47(02):986-1001.
(9)掘进机定位与控制系统的相关视频、图片等。
4.案例思考题
(1)煤矿井下采掘设备定位方法有哪些?它们的工作原理分别是什么?
(2)视觉测量技术在井下采掘设备位姿测量方面有哪些优势?视觉测量技术在井下应用时可能遇到哪些问题?
(3)掘进机成型截割的工艺流程是什么?如何利用视觉伺服控制实现掘进机自主成型截割?
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握掘进机定位与控制系统的硬件构成、以及检测模块与控制模块的基本理论和方法。
教学建议:建议采用翻转课堂教学法,学生通过查阅文献自主完成设计,课堂上教师给予针对性的指导。
6.案例联系人
张旭辉 zhangxh@xust.edu.cn,13363975328
案例9:煤矿主通风机状态监测与故障诊断系统
摘要:主通风机是煤矿安全生产的重大关键设备,其可靠稳定运行对煤矿通风安全至关重要。由于风载不稳定、颗粒物击打叶片、轴承磨损和煤泥粘结等原因,通风机的转子-轴承系统难免引发异常振动或声响。采用压电式加速度传感器采集通风机壳体振动信号,通过时域分析、频域分析甚至时频分析能够揭示信号变化规律,提取信号特征信息,将其与设备结构、工况等关联,能够诊断其机械故障。该案例是煤矿智能安全生产的关键技术之一,能够用于《机械工程测试技术》《机械设备故障诊断技术》《机电一体化系统设计》等课程中“压电式传感器”“机械故障诊断”“虚拟仪器”等内容的案例教学。
关键词:煤矿;主通风机;状态监测;故障诊断
一、科研项目基本信息介绍
樊红卫,张旭辉,姜俊英,万翔,毛清华,薛旭升,董明. 陕西煤业化工技术研究院有限责任公司,煤矿旋转机械在线诊断及故障预警系统软件开发,2018-07至2019-11,37万元,已结题
二、科研促进教学案例
1.案例主要内容
开发的“煤矿主通风机状态监测与故障诊断系统”如图1所示。为了实时监控煤矿主通风机的运行状态,设计了振动在线监测与故障诊断系统。系统接入振动信号,多个通道同步采集振动信息,经信号预处理后分别进行时域和频域分析;结合设备实际运行状况,设置故障阈值以判断设备当前状态和故障情况。在某煤矿主通风机上进行了生产现场应用验证,实际提取的通风机特征频率与理论计算值误差小于5%,证明系统功能正常、数据分析准确可靠。

图1 煤矿主通风机状态监测与故障诊断系统
以陕西彬长文家坡矿业有限公司路村风井1#主通风机为例,结合现场实际情况,在通风机叶片附近布置三个振动加速度传感器,利用开发的通风机振动在线监测与故障诊断系统连续实时监测通风机运行状态。上位机软件开通三个采集通道,每个通道采样频率为6.25KHz,诊断模式选择“故障分类”,故障阈值设置为10,风机运行转速495r/min。上位机连续运行16小时后,监测结果如图2所示。图中,左上角为时域振动波形,左下角为FFT谱图,中间上方为测点指示图,下方为历史趋势显示,右上角为故障灯和文字提示区,右下角为故障记录区。
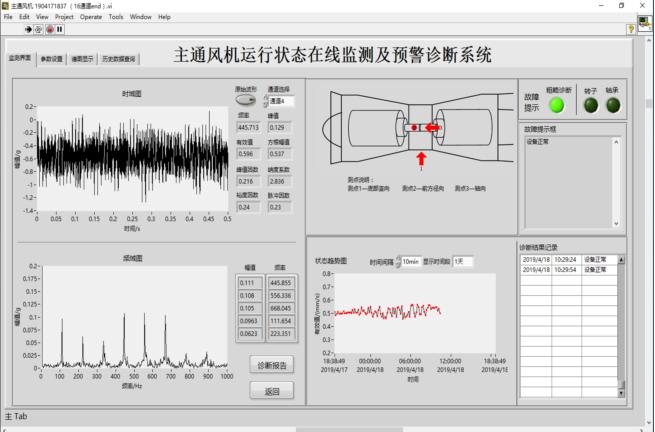
图2 系统在某煤矿实际应用界面
本案例已开发相关软件系统1套,发表论文10余篇,申请专利1项,登记软著1件,可用于《机械工程测试技术》《机械设备故障诊断技术》《矿山设备与电气控制》《机电一体化系统设计》等课程的案例教学。
2.案例实际应用效果简介
(1)本案例长期用于机械类各专业本科生多门专业课程的理论教学,具有技术前沿性、综合性和实用性特点,能够支撑学生创新能力和知识综合应用能力的培养,启发学生认识并探索解决复杂机电工程问题。
(2)本案例相关内容已在张旭辉、樊红卫等主编《机电一体化系统设计》规划教材中引用,主要服务于该教材“第5章 机电一体化检测系统设计——5.4 设备健康监测常用传感器及检测技术”等章节的讲授,体现了教学内容的新颖性和高阶性。
3.支撑材料
(1)“煤矿旋转机械在线诊断及故障预警系统软件开发”项目结题报告;
(2)已发表的主要参考论文
[1]杨一晴,马宏伟,樊红卫,张超,张勇强,韩磊. 矿井主通风机振动在线监测与故障诊断系统及试验[J]. 煤矿机械,2019, 40(12): 161-163.
[2]杨一晴,马宏伟,樊红卫,张旭辉,张超,韩磊. 煤矿旋转机械在线故障诊断及预警系统设计[J]. 工矿自动化,2019, 45(10): 104-108.
[3]樊红卫,杨一晴,邵偲洁,张超. 一种转子振动故障诊断及预警的虚拟仪器系统开发与验证[J]. 机械设计与制造,2019, (6): 77-79, 83.
4.案例思考题
(1)压电式加速度传感器与电涡流位移传感器测振动信号有何区别?
(2)针对非平稳信号,如果采用普通FFT,会产生什么问题?如何解决此问题?
(3)矿用设备状态监测系统相比普通监测系统有何特殊要求?
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握“煤矿主通风机状态监测与故障诊断系统”检测单元、信号处理与分析的思路和关键技术。
教学建议:建议采用翻转课堂教学法,学生通过查阅文献自主完成设计,课堂上教师给予针对性的指导。
6.案例联系人
案例10:采煤机摇臂状态监测与故障诊断系统
摘要:采煤机摇臂传动系统具有紧凑的结构和大减速比,因地质条件复杂导致工况多变、伴有冲击,其齿轮、轴承等关键部件容易发生裂纹或断裂等严重故障。本案例针对采煤机传动系统的典型故障,提供相关数据和仿真模型,通过实测数据分析与动力学仿真结果对比,证明信号分析结果的正确性。案例开发了一套采煤机故障诊断系统,能够实现对其运行状态监测与典型故障诊断。该案例能够用于《机械设备故障诊断技术》《机电一体化系统设计》等课程中“动力学建模仿真”“传感与信号分析”“监测诊断系统”案例教学。
关键词:煤矿;采煤机;传动系统;状态监测;故障诊断
一、科研项目基本信息介绍
毛清华,樊红卫,刘志明,万翔,薛旭升等. 陕西省重点研发计划一般项目,2019GY-093,采煤机机械传动装置远程智能诊断系统研发,2019-01至2020-12,10万元
二、科研促进教学案例
1.案例主要内容
开发的“采煤机状态监测与故障诊断系统”如图1所示。系统功能包括数据采集、信号处理功能、故障诊断功能、数据管理功能及辅助功能。搭建试验平台,模拟了齿轮裂纹故障,利用开发的系统实时监测并诊断轮系运行状态,结果表明,太阳轮出现齿根裂纹时振动信号幅值频谱图中啮合频率、太阳轮故障特征功率及其组合频率处峰值突出,证明所构建的轮齿裂纹动力学模型是可行有效的,时频信号分析方法是可靠实用的,状态监测及故障诊断软件运行稳定可靠。

图1 采煤机状态监测与故障诊断系统
本案例已开发相关软件1套,发表论文8余篇,申请专利1项,登记软著1件,可用于《机械设备故障诊断技术》《机械工程测试技术》《矿山设备与电气控制》《机电一体化系统设计》等课程案例教学。
2.案例实际应用效果简介
(1)本案例长期用于机械类各专业本科生多门专业课程的理论教学,具有技术前沿性、综合性和实用性特点,能够支撑学生创新能力和知识综合应用能力的培养,启发学生认识并探索解决复杂机电工程问题。
(2)本案例相关内容已在张旭辉、樊红卫等主编《机电一体化系统设计》规划教材中引用,主要服务于该教材“第5章 机电一体化检测系统设计——5.4 设备健康监测常用传感器及检测技术”等章节的讲授,体现了教学内容的新颖性和高阶性。
3.支撑材料
(1)“采煤机摇臂状态监测与故障诊断系统”项目结题报告;
(2)已发表的主要参考论文
[1]樊红卫,张旭辉,曹现刚,万翔,杨一晴. 智慧矿山背景下我国煤矿机械故障诊断研究现状与展望[J]. 振动与冲击,2020, 39(24): 194-204.
[2]毛清华,张旭辉,马宏伟,邢望,樊红卫. 采煤机摇臂齿轮传动系统振源定位分析方法[J]. 振动.测试与诊断,2016, 36(3): 466-470, 601-602.
[3]毛清华,张勇强,赵晓勇,张旭辉,樊红卫,张飞. 变速工况下采煤机行星齿轮传动系统故障诊断[J]. 工矿自动化,2021, 47(07): 8-13.
[4]王岩,曹现刚,张旭辉,樊红卫,段雍,霍小泉. 基于知识图谱的采煤机智能维护知识库构建[J]. 工矿自动化,2021, 47(07): 29-36.
[5]张旭辉,潘格格,郭欢欢,毛清华,樊红卫,万翔. 基于深度迁移学习的采煤机摇臂部滚动轴承故障诊断方法[J]. 煤炭科学技术,2022, 50(4): 256-263.
4.案例思考题
(1)机械传动系统的故障特征频率如何计算?
(2)早期微弱机械故障的诊断有哪些常用方法?各有何优缺点?
(3)除了振动信号,采煤机的故障诊断还有哪些信号可用?这些信号的信息融合如何开展?
(4)除了故障类型的诊断外,如何基于实测数据开展故障趋势预测技术研究?
5.案例使用说明
适用范围:机械类专业本科三/四年级
配套教材:张旭辉,樊红卫等. 机电一体化系统设计[M]. 武汉:华中科技大学出版社,2020.
教学目的:掌握“采煤机摇臂状态监测与故障诊断系统”检测单元、信号处理与分析的思路和关键技术。
教学建议:建议采用翻转课堂教学法,学生通过查阅文献自主完成设计,课堂上教师给予针对性的指导。
6.案例联系人
樊红卫 hw_fan@xust.edu.cn,15829711143
 西科机械e家
西科机械e家
 友情链接
友情链接